How To Make Ping Pong Robot: The Ultimate Guide
To make a ping pong robot, gather the necessary materials and follow an online tutorial or purchase a pre-made robot kit. Introduction. Creating a ping pong robot can bring a new level of excitement to your game, allowing you to practice and improve your skills even when you don’t have a playing partner.
Whether you want to build one from scratch or purchase a pre-made kit, the process is both fun and rewarding. To get started, make sure you have all the required materials, such as a sturdy table tennis robot head, a ball launcher, a ball feeder, and a net.
Additionally, gather basic tools including a screwdriver, pliers, and wire cutters to assemble the robot components. Online tutorials provide step-by-step instructions on how to build your own robot, or you can purchase a ready-made kit that comes with the necessary parts and instructions.
By making or buying a ping pong robot, you’ll have an innovative training tool that can enhance your skills and take your game to the next level.
Crafting Your Ping Pong Robot
Craft your own ping pong robot with this simple guide. Learn the steps to create your personalized ping pong robot to enhance your game.
Understanding The Basics Of Robotics
To craft your own ping pong robot, it’s important to have a basic understanding of robotics. Robotics involves the design, creation, and programming of machines that can perform tasks autonomously or with minimal human intervention. With a good grasp of robotic principles, you’ll be better equipped to build your ping pong robot.
Essential Components For Ping Pong Robot
When it comes to creating a ping pong robot, there are certain essential components that you’ll need to gather. These components include:
- Microcontroller: The brain of your robot, responsible for controlling its movements and actions. Arduino and Raspberry Pi are popular choices for microcontrollers.
- Motors: To enable the robot to move and swing the ping pong paddle, you’ll require servo or stepper motors. These motors allow for precise control and movement.
- Sensors: Sensors such as ultrasonic sensors or infrared sensors can be used to detect the ball and the position of the opponent.
- Ping Pong Paddle: The paddle is a crucial part of the ping pong robot. You can either build your own custom paddle or repurpose an existing one.
- Power Supply: You’ll need a reliable power supply to ensure your robot has enough energy to function. Choose a power source that matches the power requirements of your components.
Once you have these components, you can begin assembling your ping pong robot. It’s important to ensure that all the components are compatible with each other and well-secured to avoid any mishaps or malfunctions during gameplay. Follow the instructions provided by the manufacturers or any guides you follow carefully to ensure proper assembly.
Remember, building a ping pong robot requires patience, attention to detail, and some technical knowledge. However, the satisfaction of seeing your creation in action and honing your ping pong skills will make it all worth it in the end!
Designing The Robot Framework
Designing the framework for your ping pong robot is an exciting and crucial step in the process of bringing it to life. This is where you lay the foundation for the robot’s structure and functionality.
In this section, we will explore the key aspects of designing the robot framework, including choosing the right materials and creating the blueprint for structure.
Choosing The Right Materials
When it comes to building a ping pong robot, the choice of materials plays a pivotal role in achieving optimal performance and durability.
To ensure your robot can handle the fast-paced nature of the game, it is essential to select materials that are lightweight yet robust.
Here are some considerations to keep in mind:
- Ball feeding mechanism: The material used for the ball feeding mechanism should have good grip and low friction to ensure smooth and accurate ball delivery.
- Arm and body: These parts require materials that are sturdy and flexible. Carbon fiber or aluminum are popular choices due to their lightweight nature.
- Wheels and motors: The wheels and motors need to be made of durable materials that can withstand repetitive motion and provide efficient propulsion.
By carefully choosing the right materials, you can ensure that your ping pong robot not only performs well but also lasts for a long time.
Creating The Blueprint For Structure
Before diving into the construction phase, it is crucial to create a detailed blueprint for the structure of your ping pong robot. This blueprint will serve as a guide, helping you visualize the components and their arrangements.
Here are the steps involved in creating a blueprint:
- Identify the key components: Determine the essential parts of the robot, such as the ball feeding mechanism, arm, body, wheels, and motors.
- Measurements and dimensions: Take precise measurements of each component to ensure they fit together seamlessly. Consider factors such as reach, ball trajectory, and clearance between moving parts.
- Assembly order: Determine the order in which the components will be assembled to avoid any clashes or interference during construction.
- Considerations for wiring and electronics: Plan the placement of wires, sensors, and electronic components to ensure tidy and efficient connections.
By following these steps, you can design a blueprint that serves as a roadmap for building your ping pong robot.
Selecting Motion Mechanisms
Selecting motion mechanisms for your ping pong robot is essential for optimal performance. This guide will help you make the right choices to create a robot that can deliver precise and powerful shots with accuracy and speed.
Ping pong robots have become a popular training tool for players looking to improve their skills without relying on a partner.
One of the key aspects of building a ping pong robot is selecting the right motion mechanisms. In this article, we will explore the types of motors and their uses, as well as the best servos for control.
Types Of Motors And Their Uses
When it comes to building a ping pong robot, choosing the right motor is crucial for achieving smooth and accurate motion. There are several types of motors that can be used in this context, each with its own advantages and applications.
- DC Motors: These motors are widely used in robotics due to their simplicity and versatility. DC motors provide a good balance between speed and torque, making them suitable for various movements required in a ping pong robot. They can be controlled easily using an H-bridge circuit, allowing for precise control over the robot’s motion.
- Stepper Motors: Stepper motors are known for their precise positioning capabilities, making them ideal for applications that require accurate movement. These motors move in discrete steps, which can be advantageous when controlling the position of the ping pong robot. With the right driver circuitry, stepper motors can be used to achieve controlled and repeatable motions.
- Servo Motors: Servo motors are commonly used in hobbyist robotics and are well-suited for applications where precise control over position and speed is necessary. They consist of a motor, position sensor, and control circuitry, allowing for closed-loop control. Servo motors are widely available and easy to integrate into a ping pong robot project.
Securing The Best Servos For Control
Servo motors play a crucial role in controlling the movement of a ping pong robot. Therefore, it is important to choose the best servos that offer the right combination of performance and reliability.
Here are some factors to consider when selecting servos for control:
1. Torque: The torque rating of a servo motor indicates its ability to exert rotational force. For a ping pong robot, it is important to choose servos with sufficient torque to move the ping pong ball effectively. Higher torque servos will provide more powerful shots.
2. Speed: The speed at which a servo motor can rotate is another important consideration. Faster servos will enable quicker movements, allowing the ping pong robot to respond swiftly to the ball. Look for servos with high rotational speed for optimal performance.
3. Accuracy: Precision is key when it comes to ping pong robot control. Servos with high accuracy will ensure that the robot hits the ball with the desired accuracy and consistency. Look for servos with high resolution and low positional error.
4. Durability: Ping pong robots can undergo repetitive motions over extended periods, so it is essential to choose servos that are durable and can withstand continuous use. Look for servos with robust construction and good reliability ratings. By considering these factors and understanding the different types of motors available, you can confidently select the motion mechanisms for your ping pong robot project. The right choice of motors and servos will ensure smooth and precise movements, elevating your ping pong training experience to the next level.

Credit: www.amazon.com
Read here: Are Table Tennis Robots Worth It.
How To Make Ping Pong Robot Intelligence
Are you ready to take your ping pong game to the next level? Building a ping pong robot intelligence can give you the competitive edge you need to dominate on the table.
In this post, we will explore the crucial steps involved in bringing intelligence to your ping pong robot. From programming for speed and accuracy to implementing sensors for ball detection and tracking, we will cover it all.
So, let’s dive in and discover how to make ping pong robot intelligence.
Programming For Speed And Accuracy
In order to create a ping pong robot that can outperform its opponents, programming for speed and accuracy is essential. By optimizing the robot’s movements, you can make sure that it reacts quickly and precisely to incoming shots.
This involves writing code that allows the robot to analyze the trajectory of the ball and adjust its position accordingly.
By using programming techniques such as PID control, you can fine-tune the robot’s motor movements to achieve the desired speed and accuracy.
This is crucial for hitting the ball at the right angle and with the right force. And by continuously monitoring and adjusting the robot’s performance, you can ensure that it maintains peak performance throughout a game.
Sensors For Ball Detection And Tracking
Accurately detecting and tracking the ball is a critical aspect of creating an intelligent ping pong robot. By incorporating sensors into the robot’s design, you can enable it to sense the ball and respond accordingly.
There are various sensors available that can be used for ball detection and tracking, such as camera-based systems or infrared sensors.
Camera-based systems provide high-resolution images of the playing area and can accurately track the ball’s position. By analyzing these images in real-time, the robot can calculate the trajectory of the ball and anticipate its next movement.
On the other hand, infrared sensors can detect the presence and movement of the ball based on changes in infrared light reflection.
When using sensors for ball detection and tracking, it is important to ensure they are properly calibrated and integrated with the robot’s programming.
This will enable the robot to react swiftly and accurately to the ball’s movements, allowing it to make timely adjustments and deliver precise shots.
Assembling Your Robotic Creation

Once you have gathered all the necessary parts and familiarized yourself with the different components of a ping pong robot, it’s time to assemble your very own table tennis companion.
In this step-by-step guide, we will walk you through the process of putting the parts together and troubleshoot some common assembly issues that you may encounter along the way.
Step-by-step Guide To Putting Parts Together
Follow these steps to assemble your ping pong robot:
- Start by unpacking all the parts and ensuring that you have everything you need.
- Refer to the instructional manual provided with your ping pong robot for specific details on assembly.
- Identify the main body of the robot and attach the motor to it using the screws provided. Make sure the motor is securely fastened.
- Attach the control box to the main body, ensuring all the necessary cables are connected properly.
- Next, attach the ping pong ball holder to the main body. This is where the balls will be stored.
- Connect the ball feeder to the ball holder. This mechanism will release the balls during play.
- Securely attach the table tennis net to the robot. This will ensure that the balls are directed towards your side of the table.
- Once all the components are in place, double-check all the connections and screws to ensure they are tight.
- Plug in the power supply and turn on the ping pong robot.
- Adjust the settings according to your preference and you’re ready to start playing!
Troubleshooting Common Assembly Issues
Even with careful assembly, you may encounter some common issues. Here are a few troubleshooting tips:
- If the motor is not running, check the connection between the motor and the control box. Ensure that the cables are securely attached.
- If the ball feeder is not releasing balls, make sure the feeder mechanism is properly aligned with the ball holder. Adjust if necessary.
- If the ping pong robot is not moving smoothly, check the wheels and their alignment. Also, make sure the table surface is clean and free from any debris that may impede movement.
- If the robot is not hitting the ball accurately or consistently, check the position of the net and adjust it accordingly. Also, ensure that the robot is calibrated for the desired spin and speed.
By following this step-by-step guide and troubleshooting any assembly issues, you can successfully assemble your ping pong robot and enjoy countless hours of fun and practice on the table tennis table!
The Firing Mechanism Unveiled
Discover the secrets behind creating your very own ping pong robot with “The Firing Mechanism Unveiled. ” This step-by-step guide provides easy-to-follow instructions and expert tips for designing and building your personalized ping pong playing machine.
Building The Ball Launching System
The heart and soul of a ping pong robot is undoubtedly its firing mechanism. This is the key component responsible for propelling the ping pong balls with precision and accuracy.
In this section, we will delve into the intricate details of building a reliable ball launching system that will bring your robot to life.
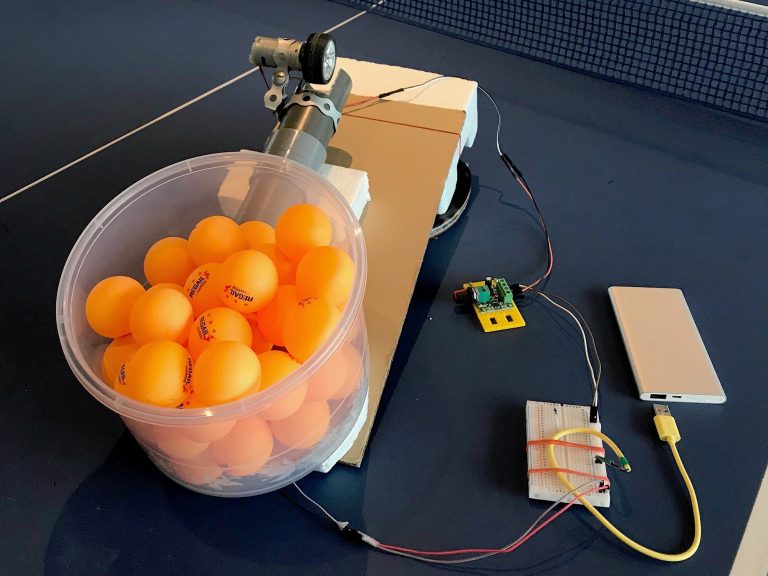
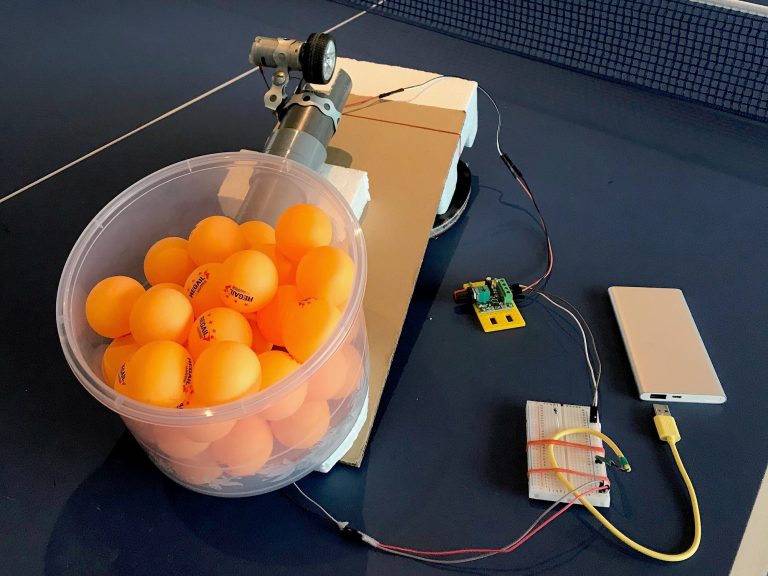
First and foremost, you need to gather the necessary materials for constructing the firing mechanism. This will typically include a motor, a hopper for storing the ping pong balls, a feeder mechanism to control the ball release, and a customizable speed controller to fine-tune the firing speed.
Once you have all the components ready, start by designing and assembling the hopper. This is where the ping pong balls will be stored before they are launched.
It’s important to ensure that the hopper is securely attached to the robot’s body to prevent any mishaps during gameplay.
Next, focus on building the feeder mechanism. This is responsible for releasing the ping pong balls from the hopper into the firing mechanism.
You can design a simple conveyor belt system or explore more intricate solutions depending on your expertise and desired level of sophistication.
Tip: When building the feeder mechanism, pay close attention to the alignment and positioning. Any misalignment can affect the trajectory of the ball, leading to inconsistent shots.
Lastly, integrate the motor and speed controller into the firing mechanism. The motor will provide the necessary power to launch the ping pong balls, while the speed controller will allow you to adjust the firing speed to match your skill level and training requirements.
Remember, precision is key when assembling the firing mechanism. Take your time to ensure everything is securely attached and aligned. This will significantly impact the final accuracy and consistency of the shots.
Fine-tuning For Perfect Ball Trajectory
Now that you’ve built the ball launching system, it’s time to fine-tune it for the perfect ball trajectory. Achieving the desired trajectory requires careful adjustment and calibration of various factors, such as launch angle, speed, and spin.
Starting with the launch angle, you can experiment with different settings to find the optimal angle that suits your playing style.
A higher launch angle will result in a higher ball trajectory, while a lower angle will generate a flatter shot. It’s advisable to start with a moderate angle and make adjustments based on your personal preferences.
When it comes to speed, it’s crucial to strike a balance. Too slow, and the ball might not reach the opponent’s side with enough force. Too fast, and you may sacrifice accuracy.
Gradually increase or decrease the speed until you find the sweet spot that delivers both power and precision.
Pro tip: Keep track of the adjustments you make to the launch angle and speed. This will help you establish a reference point and easily replicate the settings in the future.
Lastly, let’s not forget about spin. Spin plays a vital role in table tennis, adding unpredictability and challenging opponents. Experiment with different spin settings and observe the behavior of the ball.
Backspin, topspin, and sidespin can all be incorporated into your robot’s firing mechanism, allowing you to add variety and surprise to your shots.
Note: Do not underestimate the importance of practice and experimentation when fine-tuning the firing mechanism. Through trial and error, you’ll gain a profound understanding of how each adjustment affects the ball’s trajectory, enabling you to refine your robot’s performance to perfection.
Powering Your Ping Pong Automaton
When it comes to building your very own ping pong robot, one crucial aspect to consider is how to effectively power your creation for optimal performance.
The power supply is the lifeblood of your automaton, and choosing the right one is essential for ensuring long-lasting and reliable operation.
In this section, we will explore the key factors to consider when selecting a power supply and discuss measures to ensure your ping pong robot performs at its best.
Choosing A Power Supply
The first step in powering your ping pong automaton is selecting the appropriate power supply. By making an informed decision, you can ensure stable and uninterrupted power flow to your robot. Here are some factors to consider:
- Type of Power Supply: There are various types of power supplies available, including AC (alternating current) and DC (direct current). Each has its advantages, so choose one that best meets the needs of your ping pong robot.
- Voltage and Current Requirements: Determine the voltage and current specifications of your robot’s components to select a power supply that can meet these requirements. It’s essential to match the power supply with the specific needs of your automaton for efficient operation.
- Reliability and Safety: Opt for a power supply that is reliable and complies with industry safety standards. Look for certifications such as UL, CE, or RoHS to ensure that your power supply meets necessary safety regulations.
- Ease of Installation: Consider the ease of installation when choosing a power supply. Look for options that are convenient to install and compatible with your ping pong robot’s overall design.
Ensuring Long-lasting Robot Performance
Once you have selected an appropriate power supply, it’s important to take steps to ensure efficient and long-lasting performance from your ping pong automaton. Here are some measures you can implement:
- Power Surge Protection: Protect your robot from power surges and voltage spikes by using surge protectors or voltage regulators. These devices can help prevent damage to your automaton caused by sudden power fluctuations.
- Proper Cooling Systems: Ping pong robots can produce heat during prolonged usage, which can impact their performance. To mitigate this, implement proper cooling systems such as fans or heatsinks to keep the components within optimal temperature ranges.
- Regular Maintenance: Perform regular maintenance checks on your ping pong robot and its power supply to identify and address any potential issues early on. This can help prevent downtime and ensure consistent performance.
- Quality Components: Invest in high-quality components for your robot’s power supply. Using reliable components can reduce the risk of failures and ensure consistent performance over an extended period.
By carefully selecting a suitable power supply and implementing measures to maintain its performance, you can power your ping pong robot effectively and optimize its longevity.
With a well-powered automaton, you can enjoy endless hours of practice, refining your skills, and taking your ping pong game to new heights.
Testing And Enhancing Performance

Once you have successfully built your ping pong robot, the next step is to test its performance and make any necessary enhancements to take it to the next level.
Testing and fine-tuning your robot can make a significant difference in how well it performs against opponents, whether in friendly matches or competitive tournaments.
In this section, we will explore the key steps to conduct initial test runs and upgrading your ping pong robot for a competitive edge.
Conducting Initial Test Runs
The first step in ensuring your ping pong robot is at its best is conducting thorough initial test runs. This allows you to observe and analyze its performance, identify any areas for improvement, and make necessary adjustments. Here are some key factors to consider when conducting these test runs:
- Motor and ball speed: Start by testing different motor and ball speed settings to find the optimal combination that suits your playing style. Adjusting these variables can significantly impact the accuracy and trajectory of the shots delivered by your ping pong robot.
- Shot placement: Pay close attention to the precision and consistency of shot placement. Ensure that your robot is delivering shots with the desired accuracy, whether that’s aiming for a specific spot on the table or performing various shot types, such as topspin, backspin, or sidespin.
- Ball feed mechanism: Assess the smoothness and reliability of the ball feed mechanism. The robot should consistently deliver balls in a consistent and controlled manner, mimicking the behavior of a human opponent.
- Ball collection: Evaluate the effectiveness of the ball collection system, ensuring that it efficiently gathers balls from the playing area or the robot’s dedicated ball tray.
Upgrading For Competitive Edge
Taking your ping pong robot from an average performer to a formidable adversary requires continuous enhancements. Here are some upgrade ideas to give your robot a competitive edge:
- Sensors and vision: Consider adding advanced sensors and vision systems to improve your robot’s ability to track the ball’s movement and make calculated shots. These enhancements can enhance its reaction time and enable it to better analyze and predict opponent’s shots.
- Variable shot patterns: Integrate a feature that enables the robot to vary shot patterns and strategies, replicating different playing styles. This not only makes training sessions more versatile and challenging but also prepares you for different opponent playing styles in real matches.
- Multi-ball capability: Upgrade your ping pong robot to have the ability to handle multiple balls simultaneously. This feature lets you practice returning rapid-fire shots and improves your reflexes and hand-eye coordination.
- Customizable programming: Develop or modify the robot’s programming to allow for customization of shot sequences and ball placement. This flexibility empowers you to simulate specific game scenarios and train for specific weaknesses in your opponents’ game.
Regularly evaluating and enhancing your ping pong robot’s performance will help you stay ahead of the competition.
By conducting initial test runs and implementing upgrades tailored to your playing style and strategic needs, you can maximize your training sessions and elevate your game to new heights.
Frequently Asked Questions For How To Make Ping Pong Robot
How Can I Make A Ping Pong Robot At Home?
To make a ping pong robot at home, you will need a few supplies like a motor, a microcontroller, and some sensors. Follow step-by-step instructions and tutorials available online to assemble the robot.
Practice coding and adjust the settings to control the robot’s movements and ball trajectory.
What Are The Advantages Of Using A Ping Pong Robot?
Using a ping pong robot has several advantages. It allows you to practice your skills and improve your game even when you don’t have a partner. You can set the robot to deliver consistent shots and work on specific techniques.
It also provides a challenging opponent that can simulate different playing styles and shots.
How Does A Ping Pong Robot Work?
A ping pong robot consists of a mechanical arm that holds and releases the balls. It is controlled by a microcontroller that determines the speed, spin, and trajectory of the shots. Sensors detect the position of the ball and adjust the arm accordingly.
The robot can be programmed to deliver various types of shots at different speeds and angles.
Conclusion
Creating your own ping pong robot can be a rewarding and fun project that allows you to improve your game and sharpen your skills. With a few key components and some technical know-how, you can build a robot that will provide hours of practice and help take your ping pong game to the next level.
Remember to carefully consider the materials, programming, and assembly process to ensure a successful outcome. So what are you waiting for? Get started on your ping pong robot today and unlock your full potential on the table tennis court!

Benjamin Fink is the founder and lead table tennis reviewer at PingPongReviewed. He has played competitive club table tennis for over 17 years, including national-level tournaments, and has personally play-tested hundreds of paddles, rubbers, blades, tables, and training robots.
Every recommendation he publishes follows the site’s hands-on evaluation process — see How We Test for the full methodology. When he isn’t reviewing gear, Benjamin coaches beginners and writes training guides to help recreational players improve faster.